Der Beitrag kommt nun doch später als erhofft, da ich zuerst noch einige Veränderungen an meiner aktuellen Startrampe zu erledigen hatte und einiges dazwischen gekommen ist. Jetzt jedoch dafür in ausführlich und mit passenden Bildern

Ich fange mal mit den Grundlagen zu meiner Startrampe und dem Startgerät an.
Grundsätzlich bin ich ein Freund davon, die meisten Teile zuerst digital zu designen und dann erst mit dem Bauen zu beginnen, deswegen habe ich die Rampe auch als Bauteilgruppe designed. Dies hat den Vorteil, dass alles bestens dokumentiert und reproduzierbar ist falls ein Teil kaputt geht.
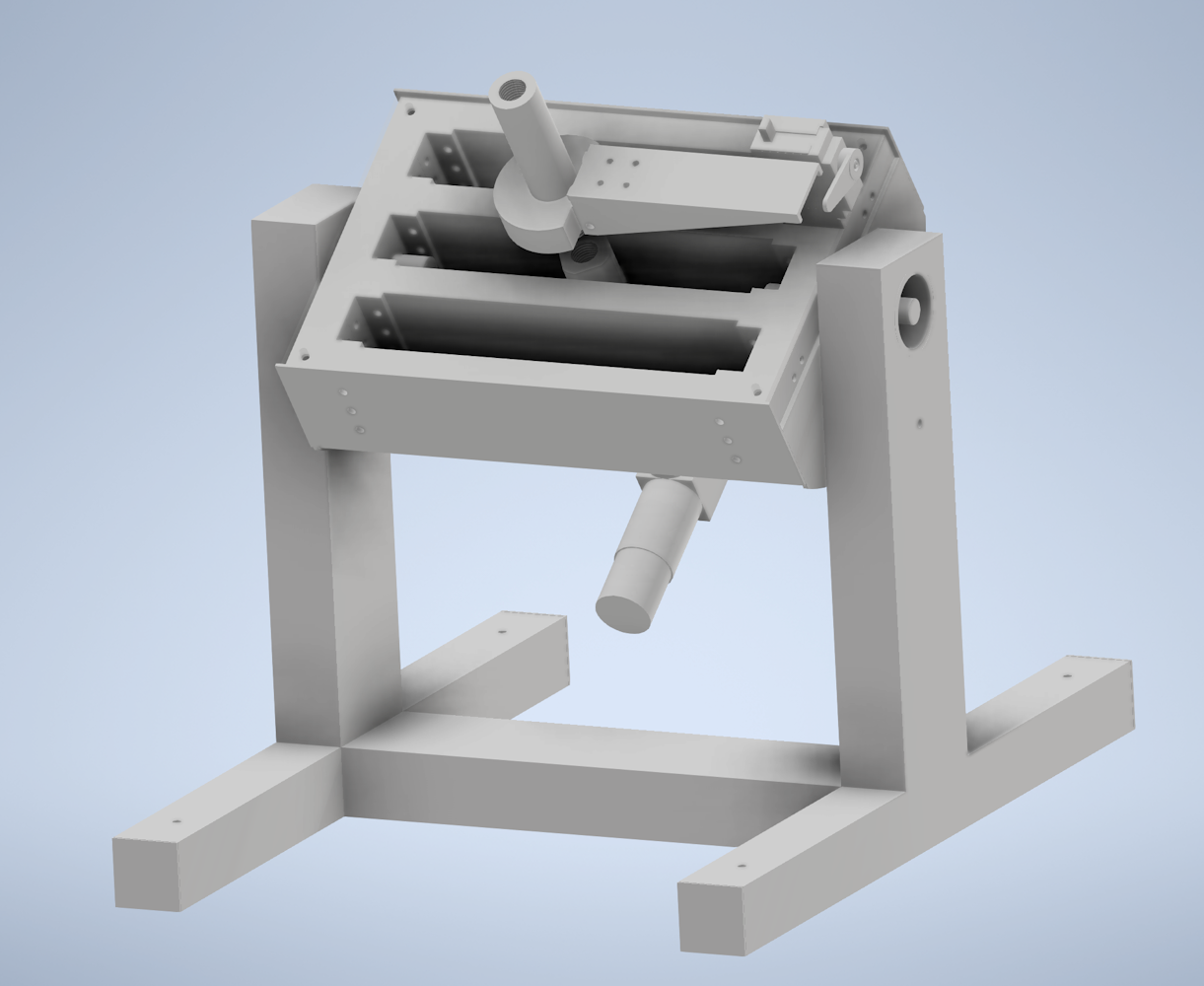
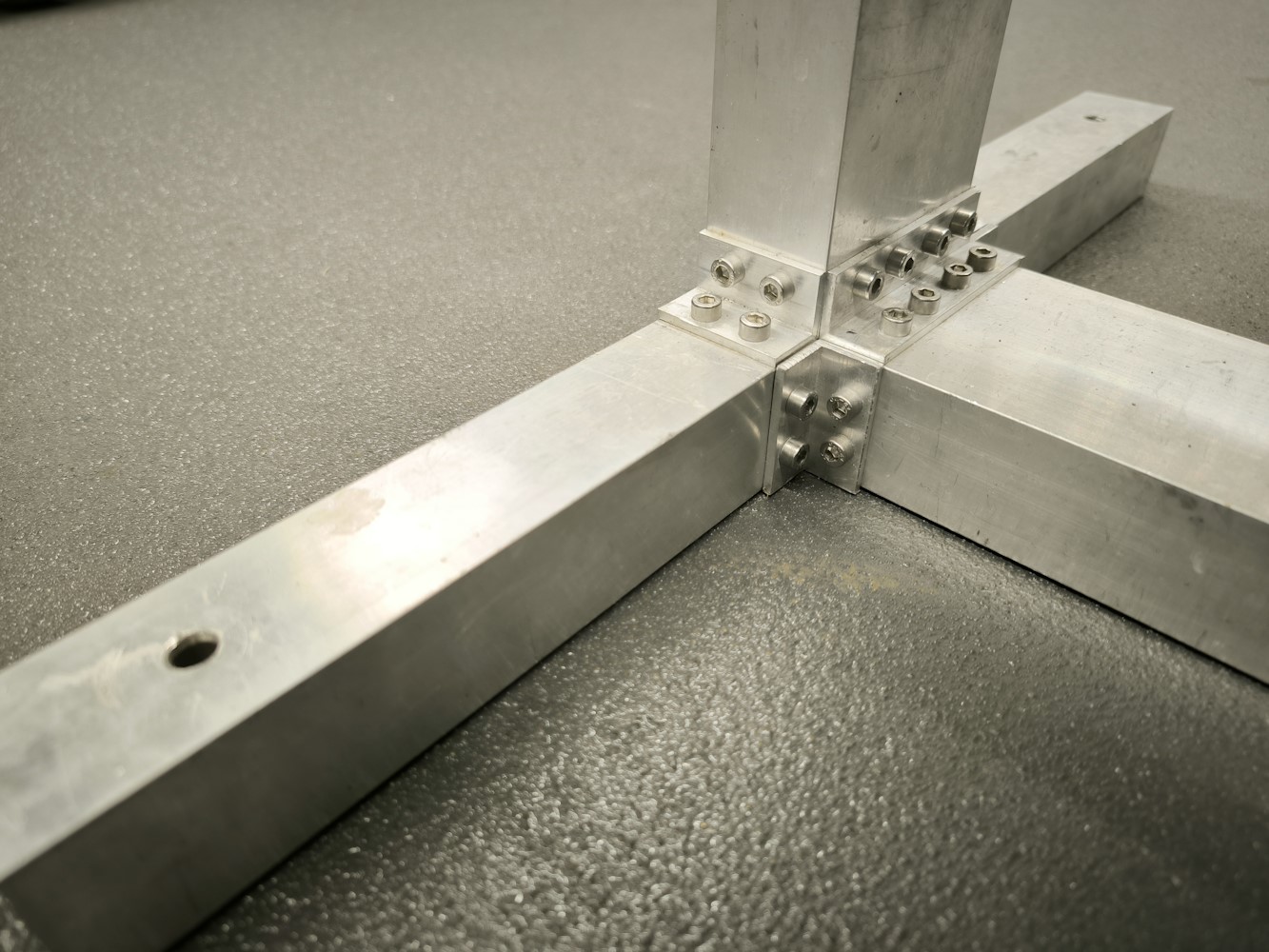
Die Startrampe ist vollständig aus Aluminium gebaut, um Probleme wie Korrosion durch das Wasser zu verhindern und gleichzeitig eine verhältnismäßig hohe Stabilität bei geringem Gewicht zu erzielen. Die Stabilität ist deshalb so wichtig, weil bei einem Düsendurchmesser von 28mm (wie bei mir) und gleichzeitig einem Druck von 60 Bar eine Kraft von etwa 380kg rückartig auf die Startrampe wirkt. Insgesamt gibt vier 8mm Löcher außen an den Beinen, in welche 45cm lange Vollgewinde Holzschrauben gehören, um auch bei etwas weicherem Boden eine feststehende Rampe zu gewährleisten.
Die Startrampe ist teilweise schwenkbar, ohne Rastfunktion beliebig feststellbar und in besonders robusten Kegellagern gelagert, um einerseits die Rakete im gefüllten Zustand mit geringem Wasserverlust aufschieben zu können und andererseits beim Start trotz einer Beschleunigung von 20G nicht zu brechen. Schließlich drückt die gesamte Kraft bei einer Wasserrakete auch auf die Rampe, was nicht zu unterschätzen ist.

Von unten betrachtet ist ein robustes Konstrukt aus 3/4 Zoll Verbindungen zu sehen, in die eine Richtung ist ein manueller Kugelhahn zur Notablassung zu finden, an dem ein selbstgedrehter Dämpfer mit minimalem Querschnitt angebracht ist. So kann die Rampe nicht durch einen abrupten Ablass und dem damit verbundenen Rückstoß umkippen.
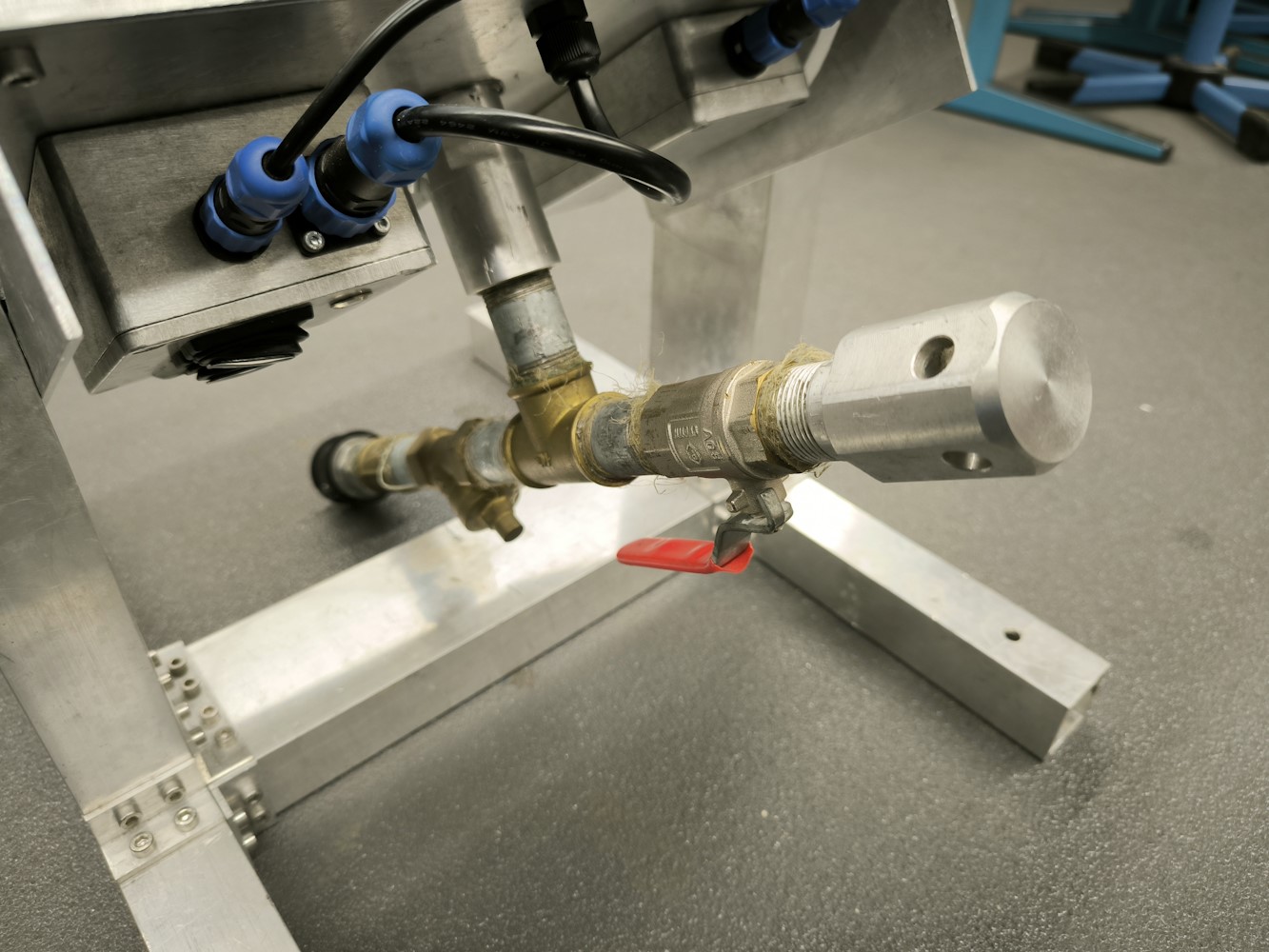
In die andere Richtung ist ein Rückstoßventil eingebaut, damit das Wasser nicht in Richtung Druckflasche fließen kann. Am Ende ist ein Kärcher Hochdruckschlauchverbinder angeschraubt, welcher mit den dazu passenden Schläuchen an einen 60 Bar Druckminderer angeschlossen wird. Als Druckflasche wird eine Argonflasche verwendet, da wir diese auch zum Schweißen verwenden können.


Die zwei Boxen aus Aluminium unter der Startrampe sind aufgeteilt in Elektronik und Akkus. Es werden zwei 3S 1,5Ah Akkus mit entsprechenden Sicherungen verwendet. Die Elektronik besteht aus einem ESP32, welcher über WLAN bzw. ESP-Now mit dem Zündgerät verbunden ist. Außerdem aus drei Spannungsprüfern, um die Spannung der beiden Akkus und des Servos zu prüfen und eine Unterladung/Überlastung zu verhindern. Einer LED-Anzeige, um die Akkus manuell auf den Ladestand zu prüfen, einem Rasttaster zum elektronischen Öffnen und Schließen des Servos, sowie einem Drucksensor innerhalb der Startrampe und einem Infrarot Wärmesensor. Dieser ist dafür da die Temperatur der Außenhülle der Rakete zu prüfen, da an einem heißen Tag, falscher Lackierung und schneller Betankung die Rakete sich stark erhitzen kann. Bei falscher Faserausrichtung und Niedrigtemperatur-Epoxy kann sich so im schlimmsten Fall die Rakete im vollgetankten Zustand unumkehrbar verbiegen.

Nachträglich wurde noch ein Loch in die obere und untere Platte reingefräst, in welches ein Leitstaab in Form eines 20x40 Aluprofils angebracht wird. Da der Durchmesser der Raketen jedoch um mehrere Millimeter variiert und die Mitte nicht verschiebbar ist, wird das Profil zur von unten wie auch oben über acht in einer Nut verschiebbaren 90 Grad Winkeln befestigt. Dadurch kann der Staab nicht nur einfach um bis zu 2 Zentimeter verschoben, sondern auch schnell abgebaut werden und hält montiert bombenfest.
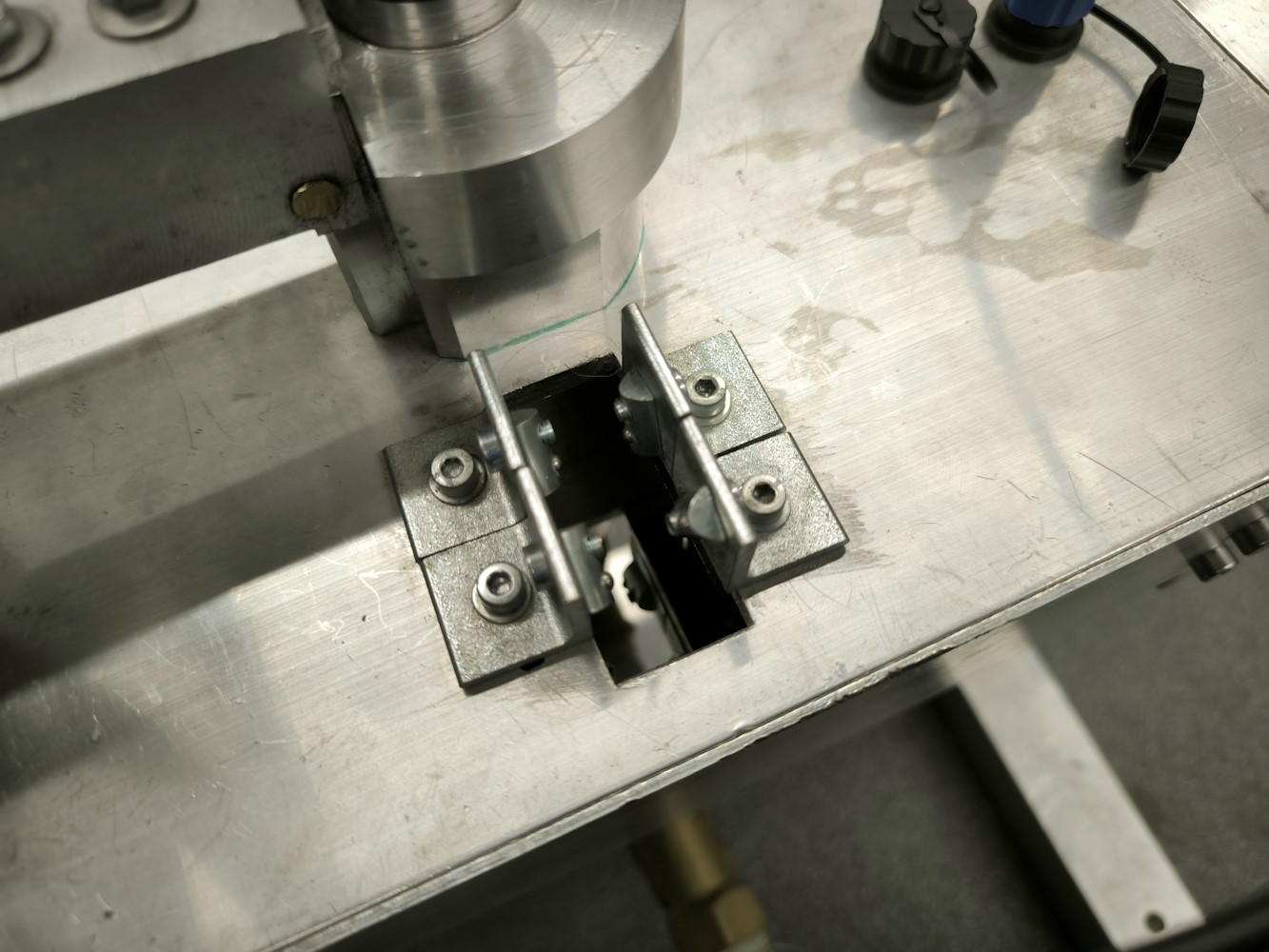
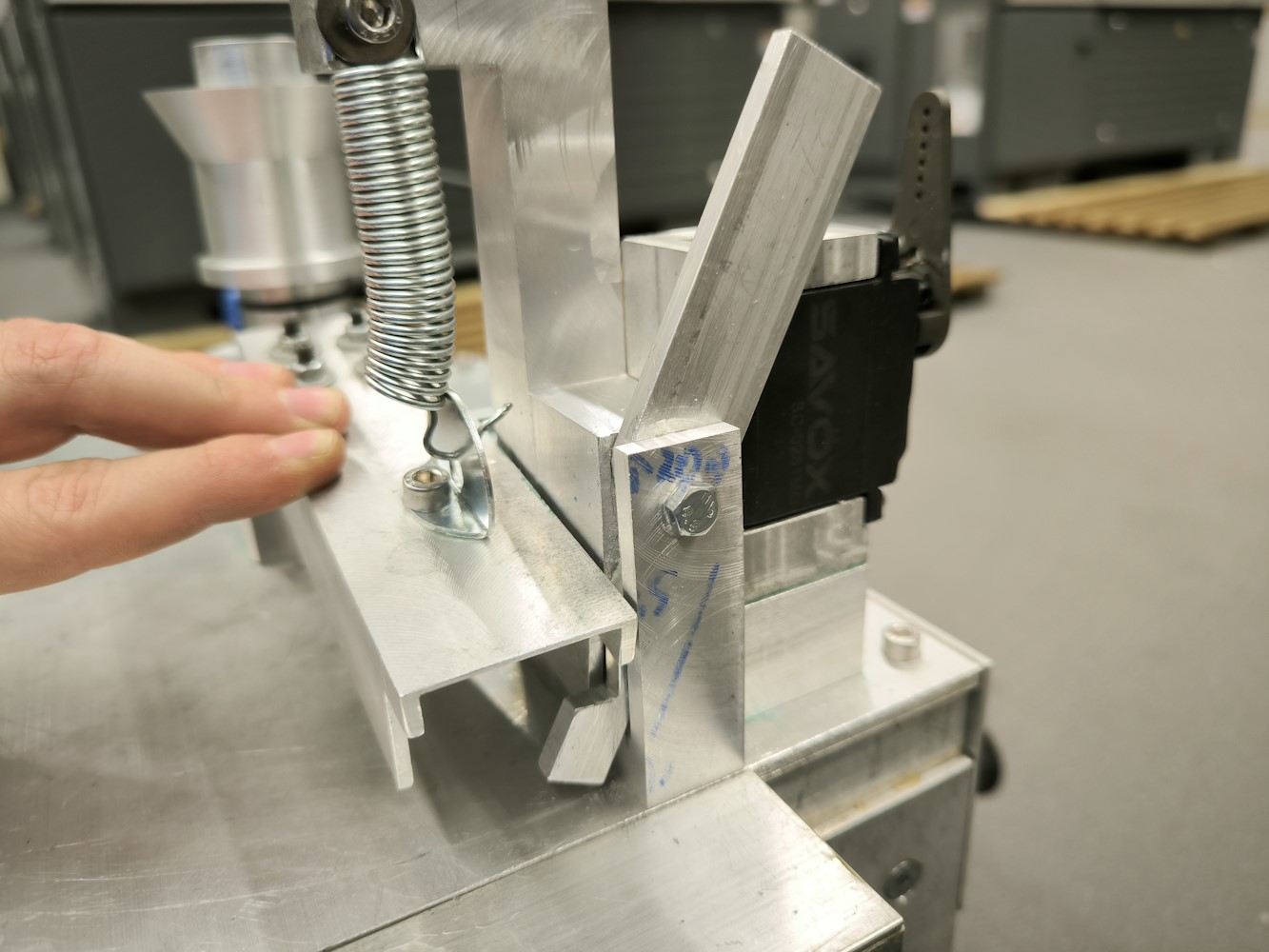
Der Auslösemechanismus wurde außerdem um einen weiteren Hebel erweitert. Das heißt der große Hebel hat das größte Verhältnis und hakt weiterhin hinter die Düse der Wasserrakete, wohingegen der kleine Hebel die Kraft des ersten Hebels etwa um den Dividend 5 verringert. Dies sorgt dafür, dass die Rampe theoretisch eine Kraft von weit über 100 bar aushalten sollte.
Zum Aufschieben der WaRa kann der sich normalerweise durch die Feder automatisch rückstellende Hebel durch eine Schraube festgestellt werden.


Das Startgerät der Wasserrakete ist seit einem halben Jahr auch endlich in einem wasserdichten Koffer mit Akku und Co. wunderbar verbaut. Hier ist genauso ein ESP32 verbaut, welcher sich dann mit der Startrampe verbindet. Zum inneren Aufbau gibt es nicht viel zu sagen, auch hier sind zwei leistungsstarke 3S Lipos verbaut, wessen Spannung überprüft wird. Außerdem kann an dem Koffer hinten ein Kabel für manuelle Zündvorgänge angeschlossen werden, dementsprechend gibt es auch zwei Relais und eine Durchgangsprüfung.
Von oben gesehen gibt es zwei Anschlüsse zum Laden der Akkus, eine Akkuladeanzeige, einen Schlüsselschalter zum Einschalten, einen Mode-Schalter, welcher zwischen WaRa-Startrampe und manueller Kabelzündung umschaltet und einen Safety-Switch. Dieser sorgt dafür, dass die WaRa Rampe aus dem deep Sleep Modus erwacht, denn der ESP verbraucht bei aktiver Internetverbindung extrem viel Strom, das heißt die Rampe ist dann 20 Sekunden am Stück am Schlafen und wacht immer nur kurz auf, um zu prüfen ob sie gebraucht wird. Nach dem Einschalten kann ich mit dem Test Taster den Servo aktivieren oder einen Durchgang prüfen und mit dem Drücken beider Taster auslösen. Mit den LED´s und dem Display kann ich dabei ich Echtzeit alle relevanten Daten überwachen.

Für die Zukunft ist außerdem geplant die Elektronik der Rampe zu erneuern, da aktuell noch recht ineffiziente Komponenten genutzt werden und der Verbrauch so um etwa 50% im deep Sleep Mode gesenkt werden könnte. Ansonsten funktioniert die Startrampe nach jahrelanger Optimierung mittlerweile einwandfrei.
So viel zu meinem Startequipment und den Zukunftsplänen, Infos zu der neuen WaRa folgen im Laufe der Zeit.


 11. September 2023 um 16:13]
11. September 2023 um 16:13]






 Grüße Marco
Grüße Marco

 !
!


