|
DennisP
SP-Schnüffler

Registriert seit: Mär 2010
Wohnort: Gießen
Verein: AGM, Solaris, Tripoli Rocketry Association (L2)
Beiträge: 844
Status: Offline
|
Also, Louis verwendet dazu doch einen Kalman-Filter in den Altimax um solche "ungewöhnlichen" Messwerte zu filtern.
Aber das wusstest du bestimmt schon.
Viele Grüße
Dennis
|
|
AchimO
Poseidon

Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Kalman-Filter ist schon klar; ich habe auch einen. Fraglich ist, ob das reicht. Eigentlich wollte ich auch mal so einen Test machen mit einer Aufzeichnung, aber im Moment bekomme ich mein OpenLog nicht zum Laufen
Gruß Achim
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
Oliver Arend
Administrator
Administrator

Registriert seit: Aug 2000
Wohnort: Great Falls, VA, USA
Verein: RMV/Solaris/AGM/TRA L1/TCV/MDRA/NOVAAR
Beiträge: 8420
Status: Offline
|
Das hängt davon ab wie Du den Kalman-Filter einstellst mehr auf "vertraue den Messwerten" oder mehr auf "vertraue dem zugrundeliegenden Modell". Außerdem sollte der Druck der Ausstoßladung den Sensor des Höhenmessers gar nicht erreichen?
Oliver
|
|
schmidi093
Epoxy-Meister
Registriert seit: Apr 2009
Wohnort: Regensburg
Verein: Solaris RMB, AGM
Beiträge: 445
Status: Offline
|
Hi Achim, mit einem linearen Kalmanfilter mit konstanter Kalmanverstärkung solltest du das Problem schon in den Griff bekommen. Das zeigen zumindest meine Tests (jedoch mit Modellen konstanten Rucks). Streng genommen ist zum Zeitpunkt des Druckstoßes die Annahme, welche für solch einen Filter notwendig ist, eines Messsignals mit konstantem Rauschen aber nicht mehr richtig. Deswegen könntest du auch einen adaptiven Kalmanfilter (Rose Filter, Rapid Ongoing Stochastic covariance Estimation-Filter) einsetzen. Dieser kann die Varianz des Messrauschens und des Systemrauschens adaptiv bestimmen. Dazu werden die Erwartungswerte deiner Messsignale über einen weitere Filter geschätzt (meist ein einfaher Kalmanfilter mit konstanter Verstärkung bzw ein IIR-Filter 1. oder 2. Ordnung) und damit die Kovarianz des Mess- und Systemrauschen adaptiv bestimmt. Ein gute Einführung dazu kannst du im Buch "Kalman-Filter - Einführung in die Zustandsschätzung und ihre Anwendung für eingebettete Systeme" (978-3-658-16727-1) finden. Solltest du Fragen dazu haben, immer her damit  Viele Grüße Thomas
|
|
AchimO
Poseidon
Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Oliver, ich sehe das so:
Meine Vorstellung ist, den Drogue per Motorausstoß auszuwerfen und den Main per Chute Release freizugeben.
Wenn der Höhenmesser in der E-Bay ist, hast du recht. Beim Einsatz des Chute Release aber ist ja dann Drogue und Main im gleichen Abschnitt des Rohrs. An das Paket des Main ist das Chute Release mit angebunden. Zwar erreicht beim Ausstoß - wenn man das so anordnet - der Druck zunächst das Drogue-Paket; ich denke aber nicht, dass letzteres so gut abdichtet, dass das Chute Release nichts vom Druckstoß "abbekommt".
Gruß Achim
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
AchimO
Poseidon
Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Nachdem ich jetzt nochmal in die Beschreibung von Jolly Logics Chute Release geschaut habe, kommen mir jetzt doch gewisse Zweifel: Bei denen ist immer nur von einem Fallschirm die Rede. Vielleicht macht der Sensor - auch im Schutztuch - den Druckstoß womöglich gar nicht mit? Fragen über Fragen
Ein Blick in das Datenblatt des BMP085 belehrt mich: Er verkraftet 10 bar; das wird der BMP180 wohl auch mitmachen. Gruß Achim
Geändert von AchimO am 18. Mai 2020 um 20:47
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
AchimO
Poseidon
Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Um der Sache noch etwas näher zu kommen - und da mein OpenLog offenbar streikt -, habe ich mal eine früher gewonnene Messreihe genommen und auf dem Computer die Daten über das Kalman-Filter geschickt. In der ersten Darstellung der ungestörte Verlauf (blau: Messdaten, rot: Daten vom Kalman-Filter): 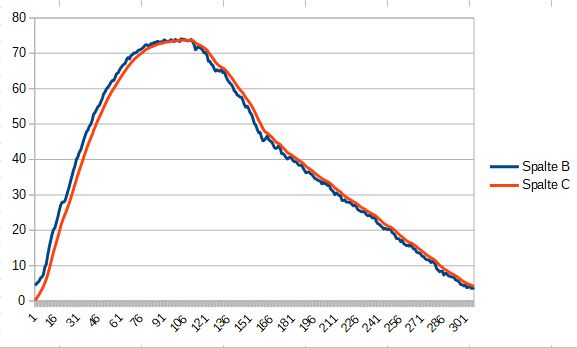 Es sind Daten vom Flug einer Wasserrakete; die Höhe ist nur ca. 74 m. Die x-Koordinate stellt einen Index dar, nicht die Zeit direkt. Die Zeit zwischen zwei Messwerten liegt bei 43 ms; bei weitem also nicht das, was Louis mit dem Altimax! erreicht. Für das zweite Diagramm habe ich an zwei Stellen einen Wert durch -200 ersetzt: 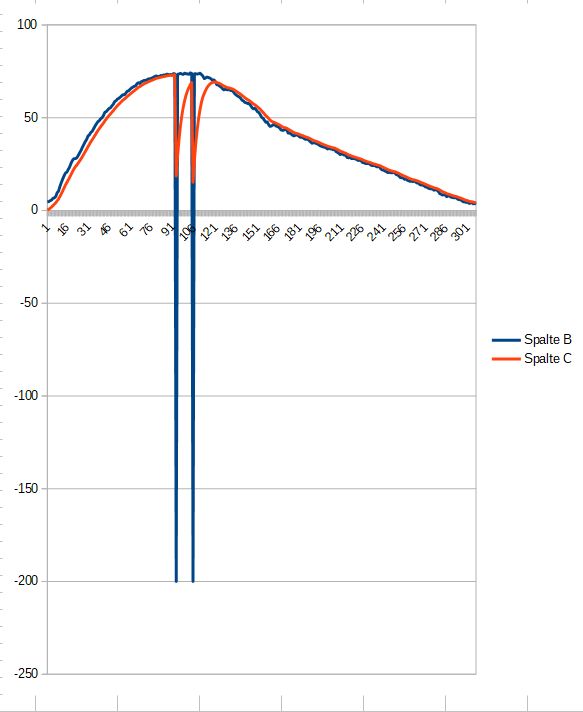 Man sieht, dass die Glättung durch das Kalman-Filter an den beiden fraglichen Stellen nicht so stark ausgeprägt ist. Im nächsten Schritt werde ich dann mal den Messwert mit dem Ausreißer weglassen und nicht übers Kalman-Filter schicken. Gruß Achim
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
AchimO
Poseidon
Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Ich habe jetzt mal einen Eingriff in das Kalman-Filter durchgeführt und folgendes eingebaut: Wenn die gemessene Höhe über der Starthöhe liegt (1) und die gemessene Höhe weniger als 80% der letzten vom Kalman-Filter ermittelten Höhe beträgt (2), dann ignoriere den Messwert und nimm den alten Kalman-Wert. Bedingung (1) soll den Bereich in der Umgebung von Start und Landung ausschließen. Bedingung (2) soll außerhalb von Start bzw. Landung zu einer Glättung der Kurve führen. Im Test sah es so aus: 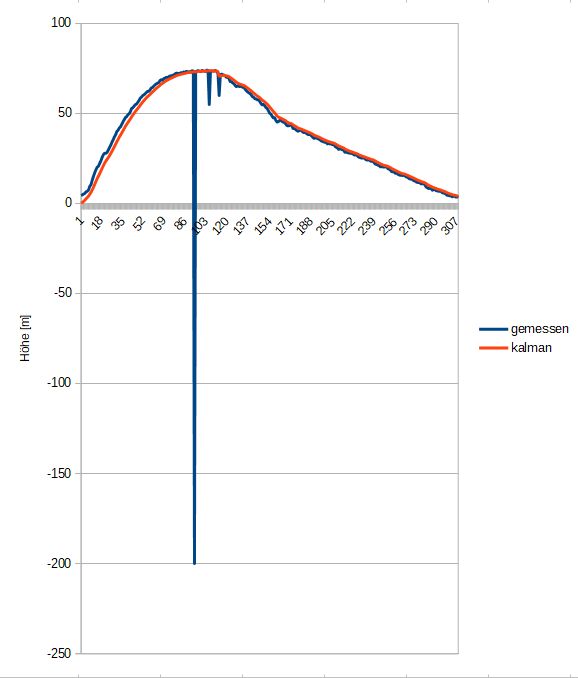 Der erste Peak liegt bei -200 m, der zweite bei 55 m (fällt also auch raus), der dritte bei 60 m (wird also berücksichtigt). Zugegeben, ein sehr heuristisches Verfahren, aber es scheint zu funktionieren. Man muss natürlich aufpassen, dass in solch einem Fall der Algorithmus nicht genau nur die Testdaten richtig verarbeitet. Mit der Veränderung der Parameter des Kalman-Filters allein das hinzubekommen, da habe ich gewisse Bedenken. Es könnte m. E. sein, dass es dann sehr träge wird. Gruß Achim
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
Oliver Arend
Administrator
Administrator
Registriert seit: Aug 2000
Wohnort: Great Falls, VA, USA
Verein: RMV/Solaris/AGM/TRA L1/TCV/MDRA/NOVAAR
Beiträge: 8420
Status: Offline
|
Wie sieht das Modell Deines Kalman-Filters denn genau aus?
Ansonsten ist ein heuristisches Verwerfen der Messwerte aber gar nicht so schlecht, finde ich.
Oliver
|
|
AchimO
Poseidon
Registriert seit: Jul 2014
Wohnort: Berlin
Verein: AGM
Beiträge: 1665
Status: Offline
|
Um ehrlich zu sein: Ich habs von Boris du Reau, rocket.payload.free.fr übernommen.
Gruß Achim
Tracking
https://www.dropbox.com/scl/fo/zap4uvchueg080w0az5og/AOOqAeAiN2aSaAEPhiusKyk?rlkey=cuvsp1db08mrwq20gqqbpicg2&dl=0
Altimeter
https://www.dropbox.com/sh/jw1nenfd45mzee3/AABZKjSB-_9DA-pLaVlOti-9a?dl=0
|
|
|

 18. Mai 2020 um 15:15]
18. Mai 2020 um 15:15]



